Satellites de navigation, géodésie et information géographique


Les systèmes de navigation par satellite sont apparus dès les débuts de l’ère spatiale. Plus précisément, le principe de fonctionnement du premier système (Transit) fut découvert par un laboratoire de recherche américain (John Hopkins University) en observant le signal du premier satellite artificiel Spoutnik 1 !
Avant cette date, seules les mesures astronomiques à partir des étoiles, du Soleil, de certaines planètes ou satellites permettaient de se localiser à la surface terrestre, aussi bien pour le géographe que pour le navigateur.
Transit ouvrait ainsi une ère nouvelle qui se concrétisa par la réalisation d’une série de systèmes développés par différents pays, à des fins militaires ou civiles, et désignés dans cet article par le sigle générique GNSS (Global Navigation Satellite System). Il fut développé par la Marine des États-Unis, initialement pour la localisation des sous-marins nucléaires Polaris. Le système Transit était constitué d’une constellation de cinq ou six satellites défilant à basse altitude, qui émettaient une fréquence radio stable à partir de laquelle un récepteur au sol pouvait faire une mesure précise du décalage Doppler dû au mouvement relatif entre ce récepteur et le satellite émetteur.
Suivant sa latitude, un point au sol pouvait être en vue d’un de ces satellites plusieurs fois par jour. De plus, une position prédite de chaque satellite était accessible aux utilisateurs en temps réel grâce à un message radiodiffusé par modulation de la porteuse émise, permettant ainsi un calcul au sol en temps réel. Les informations relatives à ce système furent déclassifiées dès 1967 afin de favoriser ses applications civiles, notamment pour la navigation maritime.
L’utilisation opérationnelle de ce système commença alors à se développer, notamment dans les cas où il offrait une réelle révolution technologique, en particulier pour la navigation en haute mer pour laquelle une précision de 100 mètres était accessible avec un seul passage de satellite, ou pour la géodésie dans les régions mal ou pas équipées, grâce à la précision métrique accessible en cumulant alors plusieurs jours d’observation en mode statique, ce qui apportait déjà un facteur 100 de gain par rapport aux déterminations astronomiques précédentes.
Le système Transit joua un rôle historique important dans les développements ultérieurs, en faisant la démonstration en vraie grandeur des performances de cette nouvelle technologie, et en faisant la preuve de ses avantages désormais incontournables en termes de globalité et d’utilisation par tout temps. L’URSS commença d’ailleurs à l’époque le développement d’un système très semblable, Tsikada.
Mais pour les besoins opérationnels, ces systèmes restaient limités en précision et en disponibilité. Les progrès des sources de fréquence ultra-stables (et horloges associées) spatialisables donnèrent naissance à un nouveau concept désormais mis en œuvre dans les systèmes GNSS actuels et que nous allons expliquer à présent.
Les systèmes globaux de navigation par satellite : signaux et services
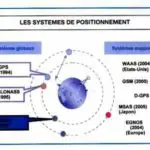
Le principe désormais retenu pour les systèmes modernes de navigation par satellite est celui de la détermination instantanée de la position du mobile par mesures simultanées de distances par rapport à plusieurs satellites en visibilité. Ces mesures sont effectuées par comptage du temps de propagation d’ondes radio émises par les satellites et reçues au sol. Le premier système ainsi développé fut le Global Positioning System (GPS) du ministère de la Défense américain, à partir des années soixante-dix et déclaré opérationnel en 1994.
Les horloges embarquées permettaient non seulement de fournir les signaux radiodiffusés (porteuses et modulations), mais aussi de réaliser ces émissions dans une échelle de temps unique pour tout le système et précisément liée aux échelles de temps internationales (UTC, TAI).
Ainsi, en mode de fonctionnement nominal, un récepteur reçoit simultanément les signaux d’au moins quatre satellites, ce qui lui permet de calculer une détermination immédiate de sa position et du décalage de son horloge locale.
Un système militaire soviétique très semblable fut alors partiellement développé (GLONASS). Sa constellation n’est actuellement pas complète, mais la Russie s’efforce toujours de maintenir l’existence de ce second système. Il offre à l’utilisateur un complément intéressant à GPS pour certains types d’applications nécessitant un plus grand nombre de satellites en visibilité. Certains constructeurs ont d’ailleurs développé des récepteurs mixtes GPS-GLONASS dans ce but.
Dans ce contexte, l’Europe décida à son tour de développer un système indépendant, Galileo, mais compatible et complémentaire avec GPS, comme l’est déjà GLONASS dans les faits.
Tous ces systèmes présentent un ensemble de caractéristiques communes :
- ils sont globaux, c’est-à-dire qu’ils peuvent fonctionner partout dans le monde,
- ils sont tout temps, c’est-à-dire qu’ils peuvent fonctionner quelles que soient les conditions météorologiques, grâce au choix des fréquences (essentiellement bande L),
- ils fournissent à l’utilisateur un accès instantané (inférieur à la seconde) aux résultats de position et datation, y compris pour un mobile en mouvement puisque les positions peuvent être calculées de manière indépendante à chaque époque.
Ils suivent une architecture commune :
- un segment spatial constitué d’une petite trentaine de satellites en orbite dite moyenne (environ 20 000 km),
- un segment de contrôle comprenant en particulier un réseau de poursuite dédié et un centre de calcul et de prévisions d’orbites des satellites,
- un segment utilisateur, lui-même comprenant de possibles augmentations, c’est-à-dire des systèmes complémentaires du système de base, ainsi que les utilisateurs au sens le plus large.
GNSS donne ainsi accès à l’information » position » et » temps » tout comme les horloges et les montres donnent l’information de temps.
Un géoréférencement unique
Avec l’apparition des nouvelles technologies informatiques et spatiales la cartographie des terres a connu, depuis une trentaine d’années, une profonde évolution. Ces changements concernent non seulement les producteurs de cartes qui ont vu leurs moyens de production évoluer de manière très rapide vers le tout numérique mais aussi leurs très nombreux utilisateurs, professionnels ou grand public, qui peuvent ainsi accéder directement à certaines de ces innovations.
De la carte à l’information géographique
Le point central de ces évolutions réside dans la diversification des produits cartographiques. L’informatique a fait apparaître le concept d’information géographique (numérique) et de systèmes de gestion associés (SIG ou Systèmes d’information géographique). Un système complexe s’est ainsi établi entre les multiples acteurs, mettant en œuvre diverses fonctions de saisie, traitement et utilisation de l’information géographique.
L’information géographique est désormais à comprendre dans un sens très large comme toute information localisée dans l’environnement de la surface topographique (souvent désigné par le néologisme » géoréférencé »).
Multiplicité et cohérence des informations géographiques
Les sources de l’information géographiques se sont diversifiées. À titre d’illustration, on peut citer :
- la numérisation de cartes (en mode scanné ou en mode vectoriel),
- le traitement photogrammétrique de photos aériennes,
- le traitement photogrammétrique d’images satellitaires,
- les levés topographiques et topométriques classiques,
- la numérisation de plans, schémas de réseaux,
- la saisie d’objets avec information de position provenant de système de navigation par satellite (GPS en particulier, en mode statique ou cinématique).
La cohérence de toutes ces informations de nature différente devient maintenant un problème majeur, notamment en vue de leur utilisation conjointe (hybridation). Divers travaux sur un plan national par le Conseil national de l’information géographique (CNIG) ou sur un plan international (CEN, ISO) ont porté récemment sur la normalisation dans ces domaines.
Le concept de qualité géométrique des objets géographiques est particulièrement important pour l’utilisation combinée de carte classique (numérisée ou non) et de positions géographiques obtenues par GNSS. Ce point précis met en évidence une double question :
- la qualité intrinsèque de la localisation,
- la différence des références géographiques sous-jacentes.
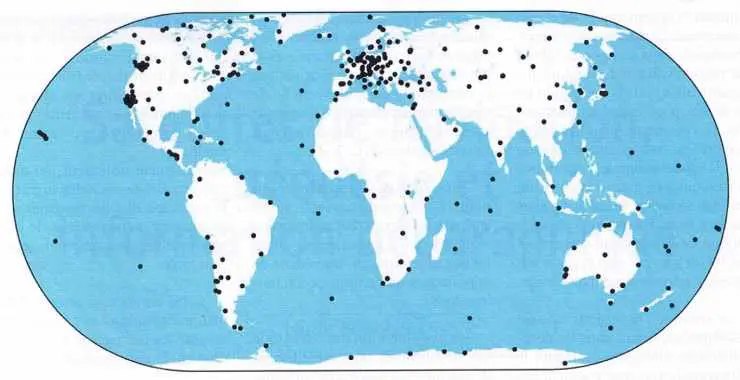
Carte du réseau de poursuite GNSS du service international IGS. © NASA/JPL-CALTECH
Exemples d’utilisation combinée carte et GNSS
Voici quelques exemples d’utilisation conjointe de résultats GNSS de position avec des données géographiques classiques :
- pour un producteur de carte topographique, tel que l’IGN pour la France, GPS est un extraordinaire outil pour la mise à jour des informations géographiques car il permet de localiser rapidement des objets géographiques nouveaux. Par exemple, la modification récente du réseau routier comme une nouvelle bretelle d’autoroute. Une utilisation typique serait alors de faire circuler sur la nouvelle portion de route un véhicule muni d’un récepteur GPS et de caméras afin d’obtenir automatiquement les informations déjà numérisées, en vue d’une mise à jour automatique des bases de données déjà existantes ;
- dans le cadre grand public, un autre exemple très répandu est la localisation par GPS d’un individu (randonneur, promeneur, joggeur…) et son report graphique sur une carte topographique numérique fournie avec le récepteur GPS lui-même. Là encore, plusieurs problèmes se posent : identification de la référence de la carte, utilisation de la grille de la carte (les cartes IGN comportent plusieurs grilles ou amorces de quadrillage pour faciliter ce type nouveau d’utilisation), utilisation des options de conversion de système géodésique (« datum ») dans le logiciel du récepteur GPS… ;
- pour le guidage et la navigation des automobiles, l’utilisation couplée de résultats de localisation GNSS et d’informations géographiques de toute nature devient maintenant incontournable.
Les références géodésiques
L’existence d’un repère de référence géodésique unique pour la Terre et son environnement immédiat, répondant aux besoins d’exactitude centimétrique, résulte de progrès accomplis durant les quinze dernières années et de décisions internationales récentes.
À ce niveau d’exactitude, la définition des systèmes de référence et leur réalisation sous forme de repères posent des problèmes scientifiques complexes. Mais, l’exactitude du mètre ou de quelques mètres, correspondant au mode normal de positionnement GNSS (99 % des utilisations), est réalisable sans aucun problème théorique ou pratique.
Le repère adopté par une convention internationale en 1991 porte le nom de Repère international de référence terrestre (ITRF, International Terrestrial Reference Frame) et est réalisé depuis cette date par une équipe française à l’IGN. Il est constitué par les coordonnées cartésiennes, dans un système d’axes ayant son origine au centre des masses de la Terre, de quelques centaines de sites répartis sur la planète. Ces coordonnées sont accompagnées de vitesses de déplacement, pour prendre en compte les mouvements tectoniques, de l’ordre de quelques centimètres par an.
L’ITRF est constamment entretenu et amélioré par le service qui en a la charge : le Service international de la rotation terrestre (IERS, International Earth Rotation Service). Des versions successives ont été publiées, la dernière en date étant celle désignée par ITRF 2000 qui donne les coordonnées de plus de 800 stations avec des incertitudes pour la plupart voisines de 5 millimètres (en 3D) pour la période d’observation de chacune de ces stations géodésiques fondamentales. Dans le cadre de cette discussion, les différences entre les versions successives de l’ITRF sont considérées comme négligeables et on parlera de l’ITRF sans autre indication supplémentaire, chaque nouvelle réalisation pouvant être considérée comme une amélioration mineure de la précédente, indispensable pour les applications scientifiques mais indiscernable avec les précédentes pour des applications grand public ou même professionnelles.
L’utilisateur standard des systèmes de positionnement se sert de coordonnées horizontales, latitude, longitude, et aussi de l’altitude. L’obtention de ces coordonnées à partir des coordonnées cartésiennes fait appel à un ellipsoïde de référence, adopté par une convention internationale, ainsi qu’à un modèle estimé du géoïde (surface équipotentielle correspondant au niveau moyen de la mer à moins d’un mètre près).
Le repère de référence utilisé par les responsables du GPS porte le nom de WGS84. WGS84 (World Geodetic System 1984) est calculé pour être en accord avec l’ITRF, sans en être dépendant pour des considérations militaires. GPS s’efforce de maintenir et d’améliorer cet accord, qui était de l’ordre du mètre au moment du développement du GPS et qui est désormais ramené à quelques centimètres.
De la même manière, Galileo fera appel à un repère aligné très étroitement sur l’ITRF. Ce repère est appelé Galileo Terrestrial Reference Frame (GTRF). Concrètement, cet alignement sur l’ITRF, pour GPS comme pour Galileo, est réalisé en attribuant aux stations d’orbitographie des coordonnées exprimées dans l’ITRF. Comme cela ne peut pas être réalisé sans incertitude, il est justifié par souci de rigueur de donner des noms particuliers aux repères de chacun des systèmes de positionnement. Mais, pour l’utilisateur courant (au mètre près), ITRF, WGS84 et GTRF sont indiscernables. Tout utilisateur devrait en être conscient.
Ces trois repères (ITRF, WGS84 et GTRF) sont ainsi les réalisations (comportant donc des incertitudes) d’un Système international de référence terrestre (ITRS, International Terrestrial Reference System), système idéal rigoureusement défini par les unions scientifiques, Union astronomique internationale (UAI) et Union géodésique et de géophysique internationale (UGGI).
Le système de positionnement russe GLONASS, analogue à GPS et Galileo, n’utilise pas l’ITRF mais un repère sensiblement différent, possédant principalement une rotation de plusieurs mètres autour de l’axe Z. Mais ces écarts sont suffisamment bien connus pour permettre à des récepteurs mixtes GPS/GLONASS de faire la conversion dans le WGS84/ITRF sans perte de précision pour l’utilisateur.
De l’utilisation des systèmes GNSS à l’utilisation des signaux GNSS
Dès le début du système GPS, avant même qu’il ne soit déclaré opérationnel, les scientifiques et tout particulièrement les géodésiens se sont intéressés de très près aux performances obtenues en localisation, tout d’abord pour des applications locales puis rapidement nationales, continentales et désormais mondiales. Il faut noter tout d’abord que les mesures principales utilisées pour les applications scientifiques sont les mesures de phase et qu’elles peuvent être obtenues sur toutes les fréquences du système avec des récepteurs de type sans code (quadrature du signal par lui-même pour éliminer les codes). Cette propriété reste vérifiée même lorsque certains codes sont classifiés pour des raisons militaires (GPS, GLONASS) ou pour des raisons commerciales (Galileo). De plus, les géodésiens se sont rapidement aperçus que la limitation en précision provenait pour des applications mondiales de la précision des orbites utilisées dans les calculs. Afin de ne pas se limiter à la précision des orbites radiodiffusées par ces systèmes (2 mètres dans le cas du GPS soit un peu mieux que 10-7 pour la précision relative de localisation au sol), ils ont déployé leurs propres réseaux scientifiques de poursuite de satellites GPS ainsi qu’une capacité indépendante d’obtenir des orbites, en temps réel ou en temps différé de très haute précision (actuellement 5 centimètres, soit 2.10-9 en précision relative au sol, soit quelques millimètres pour la localisation d’une station géodésique partout dans le monde).
Cette organisation scientifique appelée International GPS Service (IGS) fonctionne depuis sa création en 1994 sur un mode nouveau, sans échange d’argent entre organismes cartographiques et universitaires, chacun mettant à disposition de tous ce qu’il souhaite en fonction de ses possibilités et des ses objectifs propres. Les résultats (orbites et horloges des satellites) sont disponibles librement sur Internet, de manière opérationnelle (délais garantis) et gratuitement. Ce service scientifique de l’Association internationale de géodésie (AIG) fête déjà ses dix ans, sans aucune interruption de service et s’apprête déjà à étendre son activité actuelle GPS et GLONASS aux futurs satellites Galileo. On voit que l’on est passé progressivement de l’utilisation d’un système comme GPS à l’utilisation directe des signaux dans l’espace.
L’implantation de stations permanentes en complément des stations orbitographiques des systèmes a été un point crucial pour l’IGS. Ce concept s’est aussi réalisé régionalement et localement, et constitue l’exemple type des augmentations des systèmes GNSS de base. On mentionnera le réseau EPN (EUREF Permanent Network) pour l’Europe, et pour la France le réseau RGP développé par l’IGN. Grâce aux résultats de l’IGS, diverses applications imprévues et innovantes sont apparues, parmi lesquelles nous mentionnons deux exemples.
Atmosphère neutre et ionisée
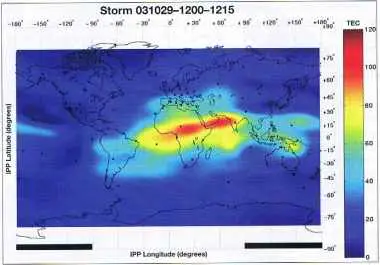
Carte du contenu électronique total de l’ionosphère à partir de données GPS. © NASA/JPL-CALTECH
En traversant les différentes couches de l’atmosphère entre le satellite et le récepteur au sol, le signal radioélectrique est perturbé et subit des retards liés à la fréquence émise et à la quantité d’électrons libres rencontrés pour la partie ionosphérique (partie haute) ou liés à la quantité d’humidité sur le trajet pour la partie troposphérique (partie basse). Le retard ionosphérique peut être mesuré de manière très précise car la plupart des systèmes GNSS sont des systèmes multi-fréquences pour pouvoir justement effectuer ce type de correction avec des récepteurs adéquats. La partie troposphérique est plus délicate à estimer, mais son amplitude est beaucoup plus faible (environ 2 mètres) et peut donc être négligée dans la plupart des applications non scientifiques. De plus, étant par nature de caractère local, ce terme a tendance à s’éliminer en mode différentiel pour deux stations proches.
Ainsi, pour les applications de type positionnement ou synchronisation, ces retards atmosphériques sont des paramètres supplémentaires qui peuvent limiter la précision du résultat. Inversement, la mesure de ces paramètres apporte de nouvelles informations sur l’atmosphère elle-même. Ces nouvelles informations sont maintenant utilisées pour des applications scientifiques ou opérationnelles. La connaissance des perturbations ionosphériques en temps réel apporte des informations essentielles qui peuvent être utilisées pour les liaisons radio. La connaissance du taux d’humidité locale permet, en liaison avec beaucoup d’autres types de données externes, de raffiner actuellement des modèles de prévision météorologiques en fournissant des données-sol très précises et pour une distribution au sol potentiellement très dense.
Orbitographie des satellites bas
De la même manière, les agences spatiales ont rapidement équipé leurs satellites d’orbite plus basse (1 000 kilomètres ou moins) de récepteurs GPS, permettant ainsi de déterminer précisément leur orbite à partir des mesures à bord. Suivant le type de récepteur GPS (monofréquence ou bifréquence, pseudo-distances ou phases), les performances obtenues actuellement vont de quelques mètres à 1 centimètre (exemple de la composante radiale pour le satellite altimétrique Jason).
Conclusions
L’apparition des systèmes de navigation par satellite comme le GPS a profondément révolutionné le domaine de l’information géographique au sens le plus large. Les producteurs de ces données ont profité des gains en productivité obtenus pour modifier profondément leurs méthodes d’élaboration et de remise à jour de leurs bases de données pour aller d’une manière désormais irréversible vers le tout numérique et aussi vers une cohérence améliorée qui dépasse désormais largement les frontières géopolitiques. Les utilisateurs font actuellement le même type d’évolution technologique, incluant désormais les récepteurs GNSS dans la liste des objets usuels et indispensables dans la vie de tous les jours. Ces systèmes ont aussi apporté des gains de précision très importants dans la plupart des domaines scientifiques liés à la connaissance de notre planète : géodésie, géophysique mais aussi sciences de l’atmosphère. L’arrivée de futurs systèmes complémentaires et interopérables comme le système européen Galileo ne feront qu’amplifier ces mutations technologiques majeures. Enfin, la dépendance accrue de nos activités à ces systèmes pose des problèmes économiques, stratégiques et politiques multiples, qui ont été et sont encore débattus dans le cadre du développement du système Galileo par l’Europe.

Articles similaires :
 Galileo, un système de navigation par satellite, à la mesure de l’industrie spatiale européenne
Galileo, un système de navigation par satellite, à la mesure de l’industrie spatiale européenne
 La navigation par satellite et les opérations critiques pour la vie humaine dans les transports
La navigation par satellite et les opérations critiques pour la vie humaine dans les transports
 Applications maritimes du positionnement par satellite
La navigation par satellite à l’heure européenne : Egnos et Galileo
Des satellites pour gagner la guerre de l’information
Applications maritimes du positionnement par satellite
La navigation par satellite à l’heure européenne : Egnos et Galileo
Des satellites pour gagner la guerre de l’information