
La voiture autonome : progrès techniques et perspectives


Les progrès techniques devraient permettre d’arriver, dans les années à venir, à une conduite automobile complètement autonome, s’affranchissant de la supervision du conducteur. On peut en particulier s’attendre au développement des voitures autonomes en environnement autoroutier et périurbain dès les prochaines années.
Pour le moment, l’automatisation est restreinte à une assistance au conducteur, lequel reste totalement responsable du comportement de son véhicule. Mais le changement arrive progressivement avec l’automatisation des véhicules que l’on observe depuis plusieurs années grâce aux systèmes d’aide à la conduite intelligents (ou ADAS, Advanced Driver Assistance Systems), tels que les régulateurs de vitesse adaptatifs, les aides au maintien dans la voie ou les systèmes anticollision. Les progrès technologiques des capteurs, calculateurs et algorithmes permettent petit à petit d’augmenter le niveau d’automatisation des véhicules et donc d’alléger la tâche du conducteur.
REPÈRES
Pour définir le niveau d’automatisation, on utilise souvent les cinq niveaux du référentiel SAE (J3016). Au niveau 1, le véhicule assiste le conducteur sur une seule dimension de la conduite (latérale ou longitudinale), par exemple avec un régulateur de vitesse adaptatif ou un suivi de voie automatique. Au niveau 2, le véhicule assure la dynamique de la conduite sur les deux dimensions latérales et longitudinales, tout en étant sous supervision constante du conducteur qui reste entièrement responsable. Le niveau 3 est le véritable gap technologique et législatif qui reste encore à franchir, car le véhicule peut alors temporairement se passer de supervision du conducteur et être entièrement responsable de la conduite – on commence alors véritablement à parler de véhicule autonome. L’absence de supervision du conducteur devient permanente au niveau 4. Enfin un véhicule niveau 5 n’a tout simplement ni conducteur ni volant.
De la voiture automatisée à la voiture autonome
Les voitures à conduite déléguée sont classées selon le niveau d’automatisation. Au-delà du niveau d’automatisation, une voiture autonome se caractérise par son domaine opérationnel (ou ODD, Operational Design Domain), pouvant aller d’une simple rue définie à une ville complète. Les exigences pour la performance du système et des capteurs ne seront pas les mêmes sur une autoroute ou en milieu urbain. L’infrastructure doit s’adapter aux voitures autonomes, par exemple avec des marquages au sol clairs et en bon état pour faciliter la reconnaissance par les caméras, et aussi avec des systèmes de communication V2I (Vehicle to Infrastructure) qui vont faciliter la progression du véhicule autonome dans son environnement.
En Europe, des projets publics comme Scoop et Safe Strip visent à expérimenter l’équipement de routes avec de tels systèmes. L’infrastructure peut alors transmettre aux véhicules les informations sur des événements à venir (zone de travaux, voie fermée, etc.) et également recevoir des informations en temps réel sur les événements détectés par les capteurs des véhicules (route glissante, accident, etc.).
Aujourd’hui, la réglementation limite le niveau d’automatisation des véhicules vendus sur le marché au niveau 2. Cependant les niveaux suivants sont de plus en plus développés, et de nombreux prototypes existent et parcourent déjà les routes en France et dans le monde. Certains modèles de véhicule en série revendiquent une configuration matérielle (capteurs, calculateurs) compatible avec les niveaux 3 ou 4, une simple mise à jour logicielle permettant d’atteindre ces niveaux dans un domaine défini.

Approche progressive et approche disruptive
Les innovations de la voiture autonome suivent aujourd’hui deux chemins parallèles. Le premier est celui des constructeurs d’automobiles « classiques » dont l’approche est progressive. Il s’agit d’automatiser les nouvelles gammes de véhicule avec des fonctions d’assistance de plus en plus avancées (maintien au centre de voie, régulateur de vitesse adaptatif, changement de voie automatique).
Dans l’ensemble, les constructeurs estiment que les technologies de niveau 2 (le véhicule régule sa vitesse et sa position dans la voie), qui sont déjà sur le marché, vont se généraliser et se démocratiser dans les prochaines années. Il est ensuite très probable de voir apparaître, au début des années 2020, des technologies de niveau 3 avec lesquelles le conducteur n’a plus besoin de superviser le véhicule dans des conditions définies (embouteillages, voies à chaussées séparées). L’extension se fera ensuite sur les autoroutes à plus haute vitesse et sur du niveau 4, puis à terme sur les autres routes et en zone urbaine.
La seconde approche est essentiellement suivie par de nouveaux acteurs, souvent des acteurs du numérique, dont l’ambition est de préparer directement des flottes de voitures autonomes complètes (niveau 4–5) en autopartage. Le véhicule n’est plus une voiture personnelle qui s’achète mais un véhicule exploité en libre-service, dont les contraintes en termes de coût et d’esthétique sont réduites et permettent l’intégration de capteurs plus performants. Ces nouveaux acteurs s’allient le plus souvent avec un ou plusieurs constructeurs d’automobiles (Waymo-JLR, Uber-Volvo…) et annoncent des flottes de taxis robots dans des futurs proches, certains dès le début des années 2020.
“Aucun capteur n’est aussi efficace qu’une paire de bons yeux.”
Percevoir l’environnement avec des capteurs plus performants et plus divers
Le principal défi du développement de la voiture autonome est de détecter et comprendre l’environnement complexe qui l’entoure. Cet environnement inclut d’autres véhicules, autonomes ou non, une signalisation qui peut être de qualité variable, des piétons, des cyclistes et désormais des trottinettes. Ces trois dernières catégories sont vulnérables et ont des trajectoires difficiles à prédire. Contrairement à une voiture, si un piéton avance tout droit à un instant, il y a des chances pour qu’à l’instant suivant il ait fait un quart de tour pour s’engager sur la voie et traverser…
Le système autonome est équipé de capteurs, qui sont l’équivalent des yeux et des oreilles du conducteur traditionnel. Ces capteurs se diversifient et sont en constant progrès depuis quelques années. Mais aucun capteur, pris individuellement, n’est aussi efficace qu’une paire de bons yeux. La clé du défi est donc de varier les technologies utilisées afin d’assurer une complémentarité des capteurs et une redondance de la détection.
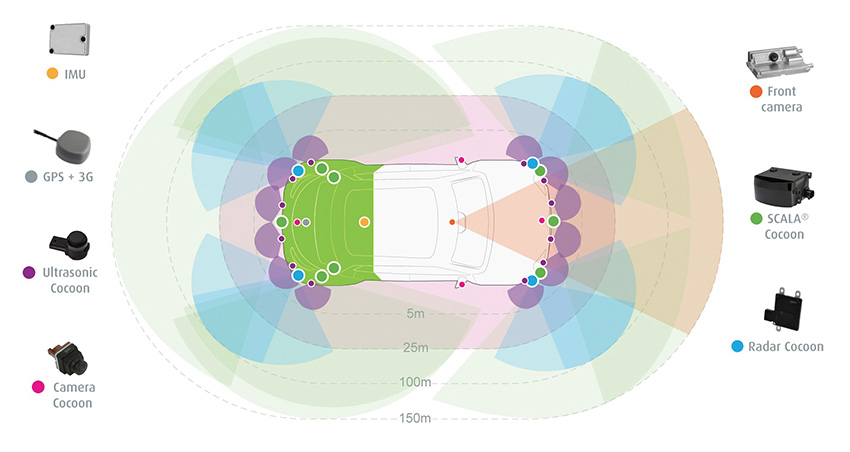
La complémentarité des capteurs consiste à utiliser le meilleur de chaque technologie pour maximiser les performances de détection. Par exemple, une caméra est idéale pour détecter les caractéristiques sémantiques d’un objet : différencier une voiture et un vélo, détecter et lire un panneau, etc. Les lasers scanners (ou lidars), dont le Scala®️ de Valeo est le premier en série sur le marché automobile, sont les plus aptes à détecter un objet lointain (jusqu’à 300 m) avec une précision centimétrique. S’ajoutent les radars qui exploitent l’effet Doppler afin de mesurer la vitesse des objets environnants et les ultrasons (appelés abusivement « radars de recul ») qui détectent principalement les objets proches. On est capable de fusionner les informations de tous ces capteurs afin de préciser les caractéristiques d’un objet.
Au-delà de cette complémentarité des capteurs, leur diversité permet d’assurer une redondance de la fonction. Par exemple, quand les conditions de visibilité sont faibles (nuit, brume, etc.), les lasers scanners et les radars continuent à détecter l’environnement avec suffisamment d’information pour éviter tout accident. On tire aussi parti des progrès de l’intelligence artificielle, notamment des techniques d’apprentissage profond. Aujourd’hui, l’état de l’art des algorithmes est très complet en ce qui concerne le traitement d’images et s’applique facilement aux caméras des véhicules.
Se localiser avec précision
Un autre défi tout aussi important pour un véhicule autonome est sa localisation. En milieu urbain, celle-ci doit être précise à une dizaine de centimètres, donc bien en deçà des GPS traditionnels de nos véhicules (quelques mètres). Les technologies de GPS plus précises (par exemple les GPS RTK) ont un coût beaucoup trop élevé et sont toujours affectées par les pertes de signaux intermittents en environnement urbain ou dans les tunnels. L’arrivée de cartographies très précises des routes (cartes HD) permet d’atteindre cette précision de localisation tout en se passant d’un tel matériel. Grâce aux capteurs, le système détecte des éléments de repère environnants (ou landmarks), par exemple les marquages au sol et l’infrastructure, et les fait coïncider avec la cartographie pour déduire sa position avec précision. L’autre avantage est de pouvoir faire automatiquement remonter les informations au fournisseur de cartographie et mettre à jour la carte en temps réel en fonction des changements détectés dans l’environnement.
Prendre des décisions sûres et réactives
L’objectif premier des voitures autonomes est de réduire les accidents de la route, dont plus de 90 % sont dus aux usagers. En évitant les problèmes d’alcoolémie, de fatigue et de distraction, la voiture autonome a tout ce qu’il faut pour réduire drastiquement ces accidents. Mais le défi est avant tout dans l’acceptation sociale de la technologie. Un accident causé par une voiture autonome sera considérablement moins toléré qu’un accident causé par un conducteur. Il est ainsi en général considéré que le risque d’accident pour un véhicule autonome doit être trois ordres de grandeur en dessous de celui d’un conducteur humain (de l’ordre d’une chance sur un million par heure de conduite), soit une chance sur un milliard par heure.
L’intelligence du véhicule doit donc être capable de gérer une diversité de cas d’usage extrêmement élevée et d’y réagir de façon à la fois sûre et naturelle pour ses utilisateurs. Pour cela, différentes approches existent et sont en général combinées.
L’approche « classique » consiste à modéliser l’environnement et le comportement potentiel des usagers et d’introduire dans les programmes du véhicule un ensemble de règles que le véhicule doit respecter (s’arrêter au feu rouge, ne pas franchir une ligne continue, etc.). Cela peut s’apparenter, pour un être humain, à l’apprentissage du « code » avant le passage du permis de conduire. Cette approche ne permet cependant pas de gérer tous les cas d’utilisation, trop nombreux.
L’autre approche qui vient en complément est celle de l’apprentissage (que l’on peut comparer aux heures de conduite et à l’expérience d’un conducteur). Les techniques d’apprentissage profond permettent alors de gérer un ensemble de cas d’usage beaucoup plus grand. En poussant l’idée au plus loin, des concepts de véhicule autonome dit end-to-end ont été présentés, pour lesquels toute la chaîne de traitement depuis les données capteurs jusqu’aux commandes volant et moteur est un gigantesque réseau de neurones entièrement construit par apprentissage.
Les nouveaux acteurs de l’innovation
L’automatisation de la conduite ouvre l’industrie automobile à de nombreux nouveaux acteurs. Les équipementiers traditionnels ajoutent à leurs portefeuilles des capteurs considérés comme nécessaires et acquièrent de l’expertise dans certaines briques logicielles. De nombreuses start-up proposent des capteurs innovants permettant de faciliter la perception et la localisation.
On peut ajouter à ces acteurs proches de l’automobile des acteurs d’écosystèmes parallèles : des géants de l’industrie de l’IT comme Intel et Nvidia investissent massivement pour pénétrer le marché automobile avec des puces électroniques permettant d’améliorer les algorithmes.
Les GAFA utilisent leurs atouts en informatique pour avancer dans ce domaine. Des entreprises de flottes de véhicules développent des navettes autonomes et des taxis robots. Enfin, les acteurs de la 5G s’intéressent de près aux besoins des voitures autonomes et des fournisseurs de cartes très précises se développent.
Un écosystème en pleine mutation
Toute l’activité de développement d’un véhicule autonome, de sa spécification avec un ensemble de cas d’usage à sa validation sur des données simulées, enregistrées ou en conduite réelle, en passant bien sûr par le développement d’algorithmes de plus en plus fondés sur de l’apprentissage, nécessite donc une quantité de données toujours plus grande. Il s’agit d’un véritable défi pour les constructeurs et équipementiers qui renforcent pour cela leurs équipes de Data Science. Le défi est d’autant plus grand que la donnée doit être « annotée » pour être exploitée, c’est-à-dire qu’une vérité terrain doit lui être associée, indiquant l’état réel de l’environnement ou la décision que le véhicule est censé prendre.
Les progrès technologiques de la voiture autonome s’accélèrent et l’écosystème s’agrandit. L’état de l’art des capteurs, des algorithmes d’intelligence artificielle et des calculateurs doit être maîtrisé et en même temps porté à un niveau de maturité et de sûreté automobile suffisant. Cela bouleverse les méthodes de développement traditionnelles et demande aux acteurs de l’automobile de s’adapter afin de tenir compte d’un besoin étendu en masse de données et en méthodes de validation efficaces. C’est également une opportunité pour eux d’étendre leur positionnement et pour des nouveaux acteurs d’émerger à l’aide d’innovations judicieuses.
Un changement de paradigme pour l’ingénieur
Historiquement, le développement d’un véhicule nécessite une validation de sûreté portant essentiellement sur les défaillances internes, notamment électroniques. La question que se posait l’ingénieur était :
« Mon système va-t-il continuer à fonctionner dans son état nominal ? » Cette question est toujours aussi importante pour le véhicule autonome mais ne suffit plus : il est maintenant nécessaire de s’intéresser aussi à l’environnement autour du véhicule et aux différents événements qui peuvent s’y produire. La question que l’ingénieur doit se poser est alors : « Est-ce que le système est suffisant pour faire face à tous les événements extérieurs possibles ? » Une telle validation est un énorme défi pour tous les acteurs de l’industrie automobile, car le nombre de cas d’utilisation est infini.
De nouveaux standards sont donc en cours de développement.
Lire aussi : https://www.lajauneetlarouge.com/equipementiers-et-constructeurs-un-partenariat-en-mutation/
Articles similaires :
 Connectivité, robotisation, intelligence artificielle, la production automobile 4.0
Connectivité, robotisation, intelligence artificielle, la production automobile 4.0
 Quelles applications pour l’IA dans le domaine des missiles ?
Quelles applications pour l’IA dans le domaine des missiles ?
 Intelligences artificielles : à quoi ressemblera le futur ?
Intelligences artificielles : à quoi ressemblera le futur ?
 Appariement des données : le potentiel de l’IA dans le parcours de soins
Appariement des données : le potentiel de l’IA dans le parcours de soins
 IA et transition énergétique : l’impact d’une technologie indispensable
IA et transition énergétique : l’impact d’une technologie indispensable
Commentaire
Ajouter un commentaire
Aujourd’hui, contrairement à ce que l’on peut lire, le niveau 2 est très loin d’être opérationnel. Deux exemples :
– le régulateur de vitesse avec la caméra qui, sur autoroute, prend les panneaux de limitation des sorties,
– le maintien dans la voie qui tente de s’opposer à une correction impérative face à un véhicule qui mord sur la ligne médiane..
Donc nous sommes encore très loin d’un véhicule autonome qui n’existera vraisemblablement jamais sauf sur des routes spécialement conçues pour cela.