De nouvelles techniques pour le contrôle aérien


Le trafic aérien a connu une progression très importante pendant les dernières décennies et toutes les prévisions tendent à montrer que cette croissance ne devrait guère se ralentir dans les prochaines années. De 1986 à 1996, le trafic a connu un accroissement de 66 % et on prévoit pour 2006 un accroissement par rapport à 1996 de l’ordre de 35 % à 70 % [TM+ 97].
Dans ces conditions, la congestion du ciel est en passe de devenir le facteur limitant de la croissance du trafic aérien, du moins en Europe, et la pression des compagnies aériennes se fait de plus en plus forte pour que la gestion du trafic soit à la fois plus souple et plus efficace.
Parallèlement, les avions s’équipent de moyens sophistiqués (FMS1, GPS2, Data Link) qui devraient permettre, à plus ou moins long terme, de changer radicalement les techniques de contrôle des aéronefs. C’est dans ce cadre qu’est aujourd’hui posé par les compagnies, suivant en cela le RTCA [cotRbod95], le concept du Free Flight (vol sans contrainte), un concept qui tendrait, sous certaines conditions, à affranchir les avions du contrôle aérien tel qu’il est pratiqué aujourd’hui et permettrait ainsi aux aéronefs de suivre le cheminement de leur choix dans certaines zones de l’espace aérien.
Comme nous allons cependant le voir, le chemin à parcourir est encore long avant la mise en place d’un tel concept.

Tour de contrôle Vigie à l’aéroport Charles de Gaulle. © P. GILBERT – AÉROPORTS DE PARIS
Principes généraux
Le but premier du contrôle du trafic aérien est d’assurer la sécurité des aéronefs. Le but second, d’assurer un écoulement aussi optimal que possible des flux de trafic, en particulier en termes de retards.
Nous allons tout d’abord poser quelques définitions indispensables pour la compréhension du reste de notre exposé.
Route aérienne : le cheminement d’un avion dans l’espace est une série de segments de droite, reliant des points de report appelés balises. Historiquement, ces balises étaient bien souvent des points équipés de moyens de radionavigation.
Plan de vol : il contient tous les éléments indicatifs décrivant le vol prévu pour un avion (heure de départ, niveau de vol, route prévue).
Contrôle en route : il s’agit du contrôle à l’extérieur des zones entourant les aéroports (dans ces dernières, on parle de contrôle d’approche).
Secteurs de contrôle : l’espace aérien est divisé en secteurs de contrôle. Chaque secteur est confié à un, ou plus souvent deux, contrôleurs, qui ont la charge d’assurer la séparation des aéronefs dans cette portion de l’espace. Le transfert d’un avion d’un secteur à un autre secteur fait l’objet d’une coordination entre les contrôleurs en charge de chacun des deux secteurs.
Séparations : on définit une distance horizontale exprimée en milles nautiques3 (NM), la séparation horizontale4, et une distance verticale exprimée en pieds5 (ft), la séparation verticale6. On dit que deux avions sont séparés quand la distance qui sépare leurs projections sur un plan horizontal est supérieure à la séparation horizontale ou quand la différence de leurs altitudes est supérieure à la séparation verticale.
Conflit élémentaire : deux avions sont dits en conflit lorsqu’ils ne sont plus séparés. Si l’on se fixe une durée T, deux avions seront dits en conflit potentiel pendant T, si durant le temps T, ils ont une probabilité non nulle7 d’être en conflit.
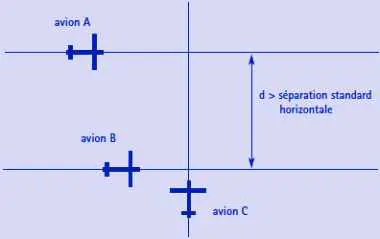
| Figure 1 – Exemple de cluster |
Cluster : un cluster d’avions est une fermeture transitive d’avions en conflits potentiels. Si un avion A est en conflit avec B à l’instant t < T (où T est l’horizon temporel exploré) et B est en conflit avec C à l’instant t + Dt < T alors A, B et C appartiennent au même cluster. Ainsi dans la figure 1, les avions A et B ne sont jamais en conflit mais ils appartiennent au même cluster. Une déviation de C pour éviter B peut lui permettre d’éviter A.
L’expression conflit à n avions signifie en fait cluster à n avions.
Améliorer l’écoulement du trafic
Il existe plusieurs approches pour tenter d’améliorer l’écoulement du trafic. Elles se divisent en deux grandes catégories : d’une part, l’amélioration de l’organisation de l’espace aérien et des flux de trafic, d’autre part, l’amélioration du contrôle aérien lui-même.
L’organisation de l’espace et des flux : on peut tenter tout d’abord d’améliorer la façon dont l’espace est découpé en secteurs. Jusqu’à présent, ce découpage a souvent été fait de façon empirique, et une approche plus scientifique peut permettre d’espérer une amélioration capacitive. Il faut cependant garder en mémoire :
1) que le découpage actuel est le résultat d’une longue expérience, et qu’il sera difficile de l’améliorer,
2) que l’on ne peut augmenter indéfiniment le nombre de secteurs, car lorsque les secteurs deviennent trop petits, la gestion des flux entrant et sortant devient plus coûteuse que le contrôle lui-même8.
On peut également tenter d’améliorer l’écoulement des flux en améliorant les modèles de capacité secteur, en proposant des tarifications du contrôle différentes en fonction des horaires, ou en proposant des routes alternatives aux aéronefs pour décongestionner certaines zones. Enfin, on peut imaginer un changement radical du découpage de l’espace en prévoyant par exemple une zone de type » Free Flight » où le contrôle serait assuré différemment. Toutes ces techniques sont actuellement à l’étude.
Le contrôle aérien : la principale raison des retards observés aujourd’hui en Europe (et particulièrement en France) est la saturation des secteurs de contrôle » en route « . Pour tenter d’augmenter la capacité du contrôle en route, de nombreuses solutions sont à l’étude. Les problèmes à traiter sont bien identifiés : il faut savoir prévoir les trajectoires des avions, détecter les conflits, regrouper ces conflits par clusters, donner des manœuvres simples les résolvant, etc.
Si les problèmes liés à la résolution de conflits aériens sont donc bien identifiés, les techniques à employer le sont moins. Avant de rentrer dans les détails techniques du problème, nous allons nous employer à présenter quelques concepts généraux.
Prévision de trajectoires et détection de conflits
Avant de songer à résoudre les conflits, il faut d’abord les détecter. Or, la détection de conflits se base avant tout sur une bonne prévision de trajectoires.

Aéroport Charles de Gaulle, tour de contrôle, salle IFR © P. GILBERT – AÉROPORTS DE PARIS
La première erreur consisterait à croire que l’on peut considérer les vitesses des avions comme constantes. En France, environ trois conflits sur quatre comprennent au moins un avion qui est en montée ou en descente ; or, si l’on prend l’exemple d’un airbus A320, il va en dix minutes passer d’une altitude de 1 000 ft à une altitude de 26 000 ft, et sa vitesse va passer de 200 à 400 km/h.
La prévision de trajectoires pourrait donc passer soit par la liaison de données, auquel cas le FMS de l’avion pourrait renvoyer une trajectoire relativement précise ; cependant, cette prévision resterait tout de même tributaire d’incertitudes externes : si un avion de ligne est capable de suivre précisément une route et une altitude, maîtriser précisément sa vitesse sol n’est pas possible en raison notamment des vents (une quinzaine de nœuds).
Il est d’autre part impossible de corriger en permanence la vitesse car les réacteurs ont un régime de consommation idéal dont il ne faut pas trop s’écarter. Enfin, ils ne doivent pas, pour des raisons mécaniques, être soumis à des changements de régime permanents.
Enfin, s’il est impossible de récupérer directement les trajectoires calculées par les FMS, on peut recourir à une simulation de trajectoires faite à partir de modèles préétablis ; les incertitudes seront alors extrêmement fortes, en raison de nombreuses inconnues (masse de l’avion, consignes de la compagnie, etc.).
Ainsi, il est à peu près inconcevable d’espérer dépasser la dizaine de minutes en termes d’horizon temporel pour la prévision de trajectoires.
Différentes approches pour l’aide à la résolution
On peut grossièrement classer les différentes approches de la façon suivante :
Approche anti-calculatoire : la première approche consiste à construire un modèle, dit » cognitif « , du contrôleur, spécialement dans ses modes d’appréhension des paramètres du conflit, et d’utiliser ce modèle dans un calculateur afin de construire des outils de filtrage de l’information et d’assistance électronique au contrôleur. Cette méthode a l’immense avantage d’être facilement intégrable au système de contrôle actuel, car elle s’emploie à changer le moins possible les modes opératoires existants.
Elle est cependant sous les feux de deux critiques, d’une part, les limitations maintenant bien connues propres aux approches dites » expertes » ou » cognitives » : coût très élevé de développement et de maintenance, problème de généralisation des maquettes au cas général, dégradation brutale de l’expertise aux limites du domaine, faillibilité du système expert [Dre79, Fox90] ; d’autre part, laissant l’homme totalement en charge de toutes les décisions, elle se contentera de repousser le » mur de la capacité [Vil87] » dont nous parlions plus haut, sans faire disparaître les causes fondamentales de son existence. Il s’agit donc d’une approche essentiellement à court ou moyen terme.
Automatisation centralisée complète : il existe maintenant des débuts de preuves montrant que la réalisation d’un système automatisé de contrôle n’est pas une pure chimère. Dans une telle hypothèse, un système central gère l’ensemble des avions présents dans l’espace, et leur donne les ordres de contrôle nécessaires à la résolution des conflits. Cette approche a été abordée pour la première fois par le projet AERA-III [Cel90, SPSS83, NFC+83, Nie89b, Nie89a, PA91] aux États-Unis, ou plus récemment le projet ARC 2000 [K+89, FMT93, MG94] du Centre expérimental Eurocontrol.
Le grand avantage de cette méthode est qu’elle permet d’augmenter de façon considérable la capacité de l’espace, la fluidité de l’écoulement du trafic et permet de garantir l’optimalité globale des solutions obtenues. Le principal problème est la transition vers un tel système depuis le système actuel. Il ne peut donc s’agir que d’une approche à long ou très long terme.
Délégation de tâches : dans ce cas, l’on tente de réaliser un partage dynamique des tâches entre l’homme et la machine au sein d’un même secteur de contrôle ; l’ordinateur prendrait en charge certains conflits et laisserait l’homme en charge du trafic restant. Cette méthode pourrait être intéressante à moyen terme : elle devrait permettre de soulager l’opérateur en cas de pointe de trafic tout en maintenant sa vigilance et ses qualifications. L’inconvénient majeur est qu’elle suppose une totale confiance de l’homme envers le calculateur, et envers la répartition de trafic et les résolutions qu’il exécute. Trop peu d’expérimentations ont été menées jusqu’ici pour pouvoir conclure.
Approche autonome : dans ce type d’approche, on suppose que les avions se trouvant dans une certaine zone de l’espace (par exemple au-dessus de 32 000 ft) utilisent des senseurs et des algorithmes embarqués pour réaliser eux-mêmes la détection et la résolution de conflits. Déjà examinée dans le cadre du projet ATLAS [DA93], le Centre expérimental d’Eurocontrol travaille dans le cadre du projet FREER à la définition d’algorithmes pouvant permettre la réalisation de ce type de système ; les documents définissant les diverses stratégies de R&D font d’ailleurs une place importante à ce type de méthodes.
Son principal avantage est sa relative compatibilité avec le système actuel : sa mise en place pourrait se faire progressivement par une tactique d’encerclement (en commençant par les espaces transocéaniques et les espaces supérieurs). D’autre part, elle permettrait de donner aux avions les trajectoires directes origine-destination qu’ils demandent à l’intérieur de ces zones » libres « .
Il subsiste cependant de nombreux problèmes : d’une part, chaque avion n’a qu’une vision limitée du monde qui l’entoure ; il est donc parfaitement susceptible de choisir des manœuvres d’évitement à court terme qui peuvent se révéler désastreuses sur le long terme, soit en termes de sécurité, soit en termes d’efficacité ; il n’existe encore aujourd’hui aucun algorithme ayant prouvé son efficacité sur des échantillons de trafic réel. Enfin, les problèmes d’interface entre les zones » libres » et les zones contrôlées ont été peu abordés.
Notons enfin que ce type d’approche est parfois confondu avec l’ACAS (Airborne Collision Avoidance System) ; ceci mérite une petite précision. L’ACAS, et particulièrement son implantation actuelle à bord des avions : le TCAS [TCA90], est un système embarqué conçu pour faire de l’évitement à très court terme (de l’ordre de la minute). Il s’agit avant tout d’un système de dernier secours pour éviter des collisions, et non d’un moyen de contrôle ou de maintien de séparation.
En fait, le dilemme dans lequel nous nous trouvons enfermés est un peu le suivant : les outils capacitifs sont difficilement intégrables dans le système actuel, et les outils facilement intégrables risquent fort d’être peu capacitifs.
La résolution de conflits
Complexité théorique
Résoudre un conflit impliquant n avions consiste dans le meilleur des cas à assurer les séparations en donnant aux avions des ordres de manœuvre, tout en minimisant les allongements de trajectoire liés aux déviations induites.
La difficulté du problème est assez facile à appréhender. Pour un conflit à deux avions dans le plan horizontal, l’espace des solutions admissibles comprend deux composantes connexes (à condition que les avions ne fassent pas de boucles) : soit l’avion 1 passe devant l’avion 2, soit il passe derrière. Un cluster à n avions contient n(n‑1)/2 paires d’avions. Le nombre théorique de composantes connexes est alors de 2 puissance n(n‑1)/2. Ceci explique l’échec des méthodes d’optimisation locale sur ce type de problème.
Des tentatives d’évaluation de la complexité théorique ont été faites. Il semble probable qu’il s’agit d’un problème NP-complet, une classe de problèmes n’admettant aujourd’hui aucun algorithme polynomial les résolvant.
Modèle de manœuvre et d’incertitude
Les ordres de manœuvre donnés aux avions doivent être facilement compréhensibles et exécutables par les pilotes. On peut, dans le cadre d’une modélisation relativement simple, se limiter à la typologie suivante :
| Figure 2 – Modèle de manoeuvre et d’incertitude |
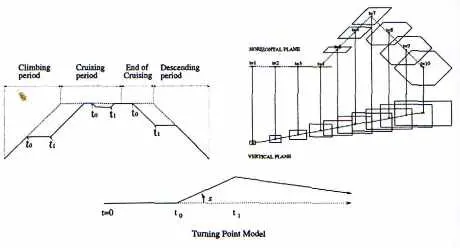 |
- dans le plan horizontal, un avion peut modifier son cap d’un angle s valant 10, 20 ou 30 degrés à l’instant t0 et reprendre la direction de sa destination finale à tt (figure 2) ;
- dans le plan vertical, le type de manœuvre dépend de la phase de la trajectoire de l’avion :
– pendant la montée, on peut interrompre la trajectoire à t0 et reprendre la montée à t1,
– pendant la phase de croisière, on peut descendre de 1 000 ft à t0 et reprendre à t1,
– la phase de prédescente commence une cinquantaine de milles nautiques avant le début de la descente. On peut alors anticiper la descente en t0 et stabiliser l’avion à t1,
– au cours de la descente, aucune manœuvre n’est possible dans le plan vertical.
Pour tenir compte des incertitudes sur les vitesses, on peut modéliser les avions non par des points matériels mais par des polygones convexes. La taille des polygones augmente dans la direction de la vitesse. On passe ainsi d’un point t = 0 à un segment, puis un parallélogramme, puis un hexagone, etc. Il suffit alors de vérifier, pour que la contrainte horizontale soit respectée, que les convexes qui modélisent les avions soient séparés par la séparation standard (voir figure 2).
Dans le plan vertical, l’incertitude est beaucoup plus forte, on maîtrise très mal le taux de montée d’un avion qui dépend de paramètres aussi variés que la masse, ou la mise en route de la climatisation. En conséquence, le même principe que dans le plan horizontal est repris mais les incertitudes sont beaucoup plus grandes. On comprend mieux, en regardant la figure 2, l’importance de la qualité de la prévision : les convexes contenant l’enveloppe des positions possibles croissent rapidement, et si les incertitudes sont trop fortes, le nombre d’avions en conflits potentiels devient en quelques minutes très, voire trop, important. D’autre part, une mauvaise prévision peut amener à résoudre des conflits qui n’auraient en fait pas lieu. Enfin, l’instant de début de manœuvre est complètement dépendant de la qualité de la prévision et son choix en est rendu particulièrement difficile.
Techniques de résolution
On peut trouver plusieurs approches pour aborder le problème de résolution de conflits.
N. Durand [Dur96] traite le problème comme un problème de commande optimale, F. Médioni [MDA94] propose un modèle permettant de le transformer en problème linéaire, celui-ci demeurant fortement combinatoire. É. Féron [OSF97] propose d’utiliser des algorithmes de relaxation convexe du problème combinatoire initial. Toutes ces techniques considèrent le problème comme global.
Une autre approche consiste à considérer le problème des conflits à n avions comme un problème séparable : des méthodes d’optimisation sont appliquées successivement sur chacun des avions impliqués ; il s’agit alors de résoudre n problèmes relativement simples et non un seul problème de grande taille, ceci au détriment de la qualité des solutions.
Enfin, une dernière méthode tend à employer des techniques de type réactif : dans ce cas, la notion d’optimalité disparaît complètement et l’on ne retient que l’admissibilité des trajectoires.
Nous allons rapidement présenter quelques exemples de ces différentes approches.
Un exemple de méthode globale de résolution
Si l’on dispose de toutes les informations concernant l’ensemble des avions, et que l’on peut agir à sa guise sur un avion plutôt que l’autre, le problème de la résolution de conflits est un problème d’optimisation globale : pour un conflit à n avions, et suivant la modélisation présentée ci-dessus, il s’agit d’optimiser 3n variables correspondant aux t0, t1 et s de chaque avion.
Pour un élément composé de 3n variables, la fonction d’évaluation à optimiser simule les trajectoires (avec incertitudes) sur T minutes à venir, mesure les conflits et s’il n’y a pas de conflit, prend en compte le retard dû aux manœuvres, la durée des manœuvres et le nombre total de manœuvres. Une solution sans conflit est toujours préférée à une solution avec conflit. On minimisera le nombre de manœuvres pour limiter le travail des pilotes, la durée des manœuvres pour libérer les avions le plus tôt possible pour une éventuelle autre manœuvre.
Il existe de nombreuses méthodes d’optimisation globale susceptibles d’être appliquées à ce problème : branch and bound par intervalles, algorithmes A*, recuit simulé, etc. Parmi les différentes méthodes, les algorithmes génétiques9 ont la particularité de ne pas requérir d’hypothèse sur la fonction à optimiser (qui peut être le résultat d’une simulation), et de pouvoir fournir en un temps donné plusieurs solutions proches de l’optimum. Par ailleurs, parmi les algorithmes que nous avons testés seules les méthodes génétiques permettent de prendre en compte des conflits de grande taille pouvant aller jusqu’à une trentaine d’avions [DA96].
| Figure 3 – Architecture générale |
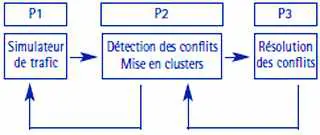 |
L’architecture générale de l’algorithme est la suivante (figure 3) :
- le processus P1 est un simulateur de trafic qui gère l’ensemble des vols passant au-dessus de la France sur une journée,
- le processus P2 est chargé de détecter les paires d’avions en conflit, de fabriquer les clusters d’avions par fermeture transitive des paires d’avions en conflit. Il vérifie également les trajectoires nouvelles proposées par P3,
- le processus P3 est l’algorithme de résolution de conflits proprement dit.
Cet algorithme a été testé sur du trafic réel dans le cadre de simulations [DA97]. Pour une journée comprenant 6 388 vols, et en prenant une incertitude de +/- 5 % dans le plan horizontal et +/- 10 % dans le plan vertical, l’algorithme résout tous les conflits (1 694) qui se présentent au-dessus de 10 000 pieds. Le retard moyen lié aux manœuvres sur l’ensemble des avions est de 5 secondes, et le retard maximal inférieur à 4 minutes.
Méthode » diviser pour régner »
Dans ce cadre, pour un problème à n avions, on cherche à résoudre successivement n problèmes à trois variables, plutôt qu’un seul problème à 3n variables.
| Figure 4 – Exemple de résolution |
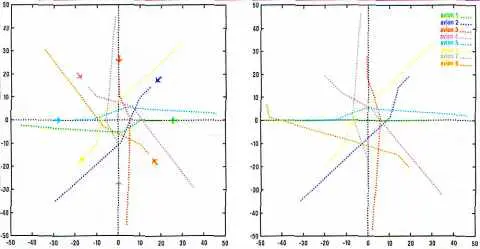 |
Dans un premier temps, on choisit une priorité entre les n avions pour savoir dans quel ordre ils vont construire leur trajectoire, puis chacun d’entre eux construit ladite trajectoire en prenant comme contraintes les avions déjà présents au moment où il résout. On peut employer là aussi diverses méthodes pour fabriquer les trajectoires [AD97, MDA98]. Le problème est relativement classique en robotique, et des méthodes relativement élémentaires comme les algorithmes A* peuvent en venir aisément à bout dans des temps raisonnables.
On peut voir sur la droite de la figure 4 un tel exemple de résolution. Le dernier avion est largement pénalisé par rapport aux autres. D’autre part, si l’on compare cette solution à celle obtenue par la méthode globale (à gauche de la figure), on constate qu’il est possible de trouver une solution de bonne qualité pour tous les avions et qui n’en pénalise gravement aucun.
En fait, cette méthode peut même ne trouver aucune solution admissible, alors que la méthode globale en trouvera plusieurs. Ainsi, dans le simple cadre d’un conflit à trois avions, l’algorithme échouera si les angles de convergence sont faibles et si, de plus, les priorités au point de passage sont mal choisies. Le problème se trouve ainsi en partie reporté sur le choix de l’ordre de résolution, ce qui est loin d’être simple.
Méthodes réactives
Le document le plus intéressant est certainement [Zeg94]. Il introduit la notion de coordination d’actions grâce à différentes forces qui s’exercent sur les agents, dans notre cas les avions.
| Figure 5 – Force répulsive et force glissante, forces de glissement coordonnées |
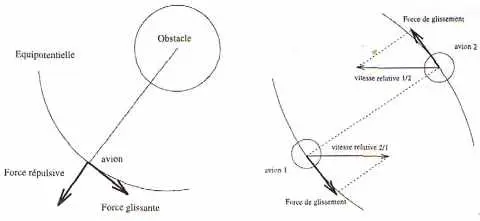 |
La méthode, initialement développée dans le domaine de la robotique ([Khatib]), se base sur l’analogie physique d’une charge dans un champ de potentiel. Pour l’évitement, le potentiel est une mesure du risque de collision. On définit ainsi trois types de forces qui devront agir suivant l’urgence :
- les forces attractives qui permettent aux avions d’atteindre leur objectif (une balise ou leur destination finale par exemple),
- les forces répulsives qui permettent aux avions d’éviter un obstacle proche donc dangereux. Cet obstacle peut être un avion ou une zone interdite,
- les forces de glissement qui permettent de contourner les obstacles.
Les avions ont alors une action coordonnée (voir figure 5). Une force de glissement est définie de la manière suivante : si l’on observe l’équipotentielle de danger passant par l’avion, une force de glissement est tangente à cette équipotentielle, alors que la force répulsive est normale. Il y a donc plusieurs forces de glissement possibles. Si l’on reste dans le plan horizontal, la figure 5 montre que l’on peut définir deux sens de glissement (droite ou gauche). Le sens optimal (il s’agit ici d’optimalité locale, pour l’avion concerné) est celui qui favorise le rapprochement vers l’objectif.
Dans le cas d’un obstacle mobile, on définit une action coordonnée d’évitement.
Pour traiter les conflits à plus de deux avions, on additionne les forces relatives à chaque avion, conformément au modèle physique (addition des potentiels). Si les résultats pratiques sont bons pour de faibles densités, les expériences menées dans le cadre de fortes densités semblent montrer un effondrement rapide du système qui en vient à générer plus de conflits qu’il n’en résout. Ceci est lié à la méconnaissance des intentions des avions ainsi qu’à la visibilité limitée de l’environnement ; différentes améliorations permettent de pallier partiellement ces problèmes, sans toutefois parvenir à les résoudre [Bos97].
Conclusion
Au terme de ce rapide survol, il faut avant tout signaler que la recherche dans le domaine du trafic aérien est une activité extrêmement récente. Les techniques présentées ici ont besoin d’être soumises à l’épreuve du monde opérationnel pour être validées.
Pourtant, il semble que les bonnes questions commencent à être posées ; l’augmentation du trafic et les contraintes économiques rendront nécessaires une sérieuse évolution des techniques de gestion du trafic aérien. Certaines réponses scientifiquement étayées commencent à être apportées aux problèmes posés ; il faut cependant se rappeler que la valeur technique d’une solution ne sera pas le seul critère intervenant dans les choix qui seront faits dans les années à venir : d’autres facteurs comme l’acceptabilité ou la facilité de transition seront certainement plus déterminants.
_________________________________
1. Flight Management System.
2. Global Positioning System.
3. 1 mille nautique vaut 1 852 m (1 minute d’arc sur un méridien).
4. Elle est de 8 NM en France mais devrait bientôt descendre à 5 NM.
5. 1 pied vaut 30,48 cm.
6. Elle vaut 1 000 ft au-dessous du FL 290 et 2 000 au-dessus.
7. Il ne peut y avoir de certitude lorsque l’on traite de la prévision de trajectoires, les avions étant soumis à de nombreux facteurs non complètement connus, comme le vent, par exemple.
8. On estime généralement que la charge de travail est proportionnelle au nombre d’avions dans le secteur, aux flux entrant et sortant, et au nombre de conflits qui se produisent dans le secteur. Le modèle théorique montre que le nombre de conflits devrait varier avec le carré du nombre d’avions. Les simulations montrent en fait qu’il croît, beaucoup plus rapidement, en raison de l’organisation du trafic réel, ce qui ne manque pas d’inquiéter.
9. Les algorithmes génétiques sont des algorithmes d’optimisation s’appuyant sur des techniques dérivées de la génétique et de l’évolution naturelle : croisements, mutations, sélection, etc. Ils ont déjà une histoire relativement ancienne puisque les premiers travaux de John Holland sur les systèmes adaptatifs remontent à 1962 [Hol62].
Articles similaires :
 Le contrôle en route de la circulation aérienne
Le contrôle en route de la circulation aérienne
 L’aéroport bloquera-t-il le développement du transport aérien ?
L’évolution des systèmes de surveillance et de contrôle des mouvements au sol des aéroports
L’aéroport bloquera-t-il le développement du transport aérien ?
L’évolution des systèmes de surveillance et de contrôle des mouvements au sol des aéroports
 De nouveaux systèmes CNS/ATM un enjeu de taille
De nouveaux systèmes CNS/ATM un enjeu de taille
 “Fly by wire” ou le pilotage électronique
“Fly by wire” ou le pilotage électronique