
Quelles perspectives pour la robotique terrestre de défense ?

Alors que la robotique se diffuse dans notre quotidien avec l’arrivée massive des robots de service et des moyens de transport autonomes, son déploiement s’intensifie également au sein des armées pour traiter des cas d’application toujours plus variés : déminage, lutte contre les engins explosifs improvisés (IED), reconnaissance, surveillance ou encore transport de matériel. Les défis que pose le développement de la robotique terrestre de défense ne sont pas que technologiques ou industriels, mais aussi éthiques.
Préserver, soutenir et accroître les capacités du combattant sont des impératifs pour l’industrie de défense en matière de robotique. Il faut aussi tenir son rang auprès des alliés, tant dans les coalitions que sur le plan de l’export ; on doit donc disposer d’équipements performants qui assurent l’interopérabilité avec les matériels étrangers innovants. La robotique peut également servir à augmenter le nombre de plates-formes sur le terrain et donc notre masse critique face à des belligérants eux-mêmes équipés de systèmes robotisés. En effet, les grandes puissances militaires comme les États-Unis, la Chine ou la Russie disposent d’ores et déjà de divers robots de combat, mais la démocratisation des petites plates-formes permet aussi à des adversaires irréguliers d’y recourir.
Ainsi, l’armée de terre française s’est progressivement dotée de différents types de robots terrestres, en complément des drones aériens plus mobiles mais généralement moins endurants et plus limités en capacité d’emport. Dans les années 1990, les forces terrestres ont pu bénéficier de systèmes de déminage téléopérés basés sur des chars AMX30 B2 DT, capables d’opérer en formation pour ouvrir des brèches dans des champs de mines. Les équipes de neutralisation d’explosifs utilisent également des robots téléopérés de quelques dizaines de kilos équipés de bras manipulateurs (tel le futur Sminex), tandis que l’arme du génie exploite le robot Minirogen avec le minidrone Drogen pour débusquer les IED.
REPÈRES
Traditionnellement, le contexte d’emploi de la robotique se caractérise par le triptyque anglophone des « 3D » pour Dull, Dirty and Dangerous, auxquels on ajoute parfois les termes Dear and Difficult, termes que
l’on peut traduire par « fastidieux, sale, dangereux, précieux et difficile ».
Il s’agit en effet : d’éloigner l’homme de la menace et de lui permettre d’intervenir en environnement hostile voire contaminé ; de mener des tâches répétitives et fastidieuses telles que la surveillance ou la manutention, afin de préserver le potentiel des soldats et de pallier les risques de fatigue ; de démultiplier les performances humaines, en complétant les cinq sens du combattant par d’autres capteurs (caméra infrarouge, lidar, détecteur d’explosifs…), en prolongeant son action à distance via des systèmes télécommandés ou en apportant une puissance de calcul précieuse pour compléter ses capacités (optimisation d’itinéraire, cartographie géométrique précise des bâtiments, etc.).
Les projets militaires terrestres sont nombreux
Ces applications sont amenées à se diversifier et tous les acteurs du domaine terrestre en ont pris la mesure. La direction générale de l’armement (DGA) vient de lancer l’acquisition de petits robots destinés aux missions de reconnaissance et de surveillance de l’infanterie comme aux missions du génie. Une récente expérimentation de robots éclaireurs a permis d’analyser les cas d’usage de plates-formes plus volumineuses et polyvalentes. Avec l’appui de la nouvelle Agence de l’innovation de défense, les forces souhaitent également projeter rapidement quelques robots « mules » en opérations extérieures afin de tester en conditions réelles l’automatisation du transport de matériel. Les feuilles de route sur les futurs convois logistiques et l’ouverture d’itinéraires piégés font aussi la part belle à la robotisation.
Enfin, la robotique est en train d’intégrer le programme Scorpion, opération d’armement structurante pour l’armée de terre et porteuse d’une transition capacitaire sans précédent avec l’avènement du combat collaboratif : il s’agit d’exploiter la mise en réseau de l’ensemble des plates-formes pour optimiser leur coordination et accélérer le tempo de la manœuvre. À l’avenir, les systèmes robotisés y joueront un rôle essentiel aux côtés des véhicules habités, eux-mêmes robotisables ou augmentés de minidrones éclaireurs. Tout en gardant l’homme au cœur des systèmes (notamment s’il s’agit de faire feu), ces nouvelles aptitudes devraient ainsi induire des évolutions profondes dans la mise en œuvre des actions tactiques et dans les doctrines futures,
a fortiori quand on sait que le concept privilégié pour le MGCS (Main Ground Combat System), remplaçant du char Leclerc à l’horizon 2035 et préparé en coopération franco-allemande, est un système multiplate-forme robotisé.
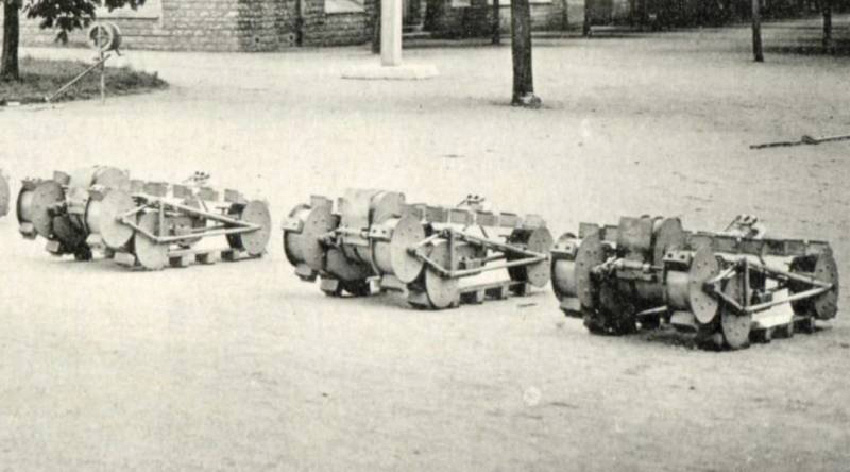
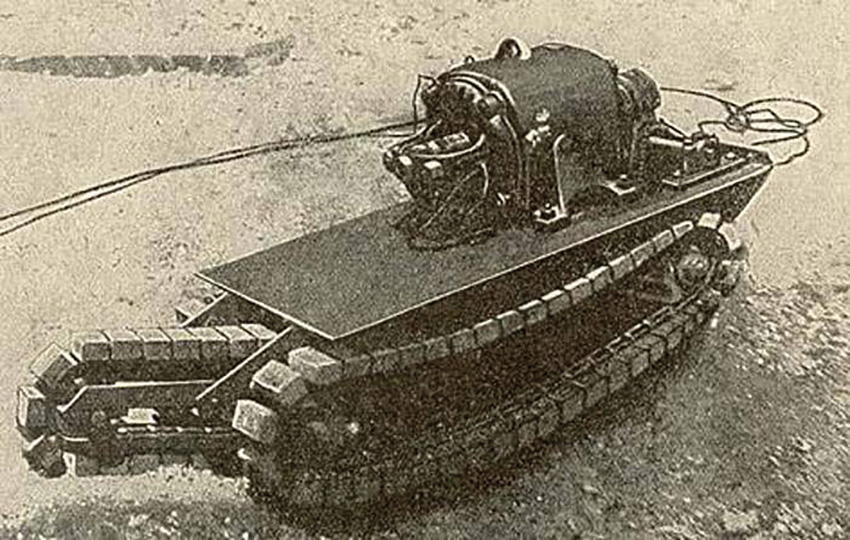
Les pionniers de la guerre de 14
La France est pionnière en matière de robots militaires, puisque les premiers robots militaires mis en œuvre sur le champ de bataille sont des systèmes français de dépose d’explosifs derrière les réseaux de barbelés ennemis (le robot électrique téléopéré Torpille Gabet & Aubriot et le Crocodile ‑Schneider automatisé), employés… dès 1915 !
De multiples défis technologiques
La réponse à ces besoins diversifiés nécessite de développer des types de plate-forme variés. Leur définition et leur architecture devront intégrer plusieurs compromis, entre polyvalence et spécialisation (pour emporter des charges utiles spécifiques comme les bras manipulateurs) ou entre miniaturisation (discrétion) et mobilité (capacités de franchissement). Cela conduit à concevoir différentes familles de robots sur un critère de masse, induisant en creux d’autres critères comme la robustesse, la charge utile ou l’autonomie énergétique.
En outre, pour répondre pleinement aux attentes opérationnelles, de multiples verrous technologiques restent à ouvrir, notamment parce que le milieu terrestre cumule un très grand nombre de difficultés pour la robotique semi-autonome, du fait de l’extrême diversité de l’environnement, de scènes parfois changeantes et très dynamiques et de zones compartimentées par des obstacles naturels ou artificiels. Ces caractéristiques impactent notablement les capacités de mobilité, de communication, de réception des signaux ou encore de traitement d’images. De plus, contrairement à de nombreux systèmes civils, les systèmes militaires doivent pouvoir s’affranchir d’une infrastructure dédiée ou de reconnaissances et balisages préalables du terrain. Cette complexité appelle l’innovation sur de nombreuses fonctions : observation (dont la modélisation d’environnement et l’analyse de scène), géolocalisation robuste, mobilité tout-terrain, communications sécurisées, nouvelles sources d’énergie et calculateurs compacts, sans oublier la standardisation, l’interopérabilité, la modularité et l’évolutivité des architectures.

La question de l’autonomie décisionnelle
Mais le challenge le plus ambitieux reste sans doute le vaste sujet de l’autonomie décisionnelle, avec des thématiques connexes comme les interactions homme – machine. Cette « intelligence embarquée » apparaît en effet comme la condition sine qua non d’un déploiement massif de la robotique. Elle permettra tout d’abord de réduire la charge cognitive induite par la téléopération et d’augmenter la disponibilité de l’opérateur pour réaliser des tâches à plus haute valeur ajoutée : un opérateur débarqué pourra ainsi assurer lui-même sa protection sans mobiliser un autre soldat pour jouer le rôle de garde du corps, tandis qu’un opérateur unique non spécialiste pourra superviser plusieurs robots. L’autonomie décisionnelle aidera par ailleurs à s’accommoder des débits parfois limités des liaisons sécurisées vers le poste de commande et favorisera la discrétion hertzienne.
Enfin, cette « intelligence » permettra à terme au robot de mieux appréhender la situation (ce qui n’est pas toujours évident pour un opérateur à distance), de suivre la manœuvre tactique et de réagir en temps réel face aux aléas. Idéalement, des interactions de haut niveau en langage naturel avec des ordres de type « déplacement sur la colline en mode discrétion pour observer tel compartiment de terrain » permettraient d’accélérer l’action des robots en évitant à l’opérateur une décomposition fastidieuse des missions en actions élémentaires avec désignation de points de passage.
Une feuille de route pragmatique et incrémentale
Pour faire face à ces multiples défis, il paraît nécessaire de procéder par étapes. Sur le plan opérationnel, cela consiste à passer progressivement de systèmes isolés à des robots mieux intégrés aux unités combattantes et interfacés aux systèmes d’information opérationnels, puis à de véritables systèmes équipiers, capables d’appuyer les soldats et de suivre l’action (en respectant les formations, les vitesses de déplacement ou encore la répartition des secteurs d’observation), l’objectif à quinze-vingt ans étant de disposer de systèmes multirobots efficaces et coordonnés. Les études R & T lancées par la DGA depuis plus de vingt ans dans ce domaine reflètent ces incréments opérationnels.
Ces études devront se poursuivre pour traiter de tâches de plus en plus complexes, dans des environnements plus déstructurés et hostiles, avec des niveaux d’interaction homme – machine évolués incluant des interfaces multimodales (combinaison d’informations visuelles, auditives ou haptiques, interfaces neuronales non invasives, dialogues en langage naturel, réalité augmentée et virtuelle, etc.) afin d’aboutir au véritable robot équipier. Il s’agira également de mettre l’accent sur la robustesse des traitements de données capteurs, la sûreté de fonctionnement des architectures de contrôle des robots ou encore la résistance au leurrage des modules fondés sur l’IA. Pour gagner la confiance des utilisateurs, les systèmes devront sans doute aussi s’auto-évaluer, afin de détecter d’éventuelles anomalies de fonctionnement, et pouvoir expliquer les sorties des algorithmes (raisonnement suivi, caractéristiques conduisant à la reconnaissance d’un objet, etc.). À terme, les progrès des systèmes multiagents permettront même de contrôler de véritables essaims de robots constitués de centaines d’unités.
Il est difficile de se livrer à un exercice prospectif sur les progrès de l’IA, compte tenu des alternances d’espoir et de désillusions passées. Il serait pourtant dommage d’attendre la complète maturité de ces technologies pour en doter les forces et de patienter ainsi de nombreuses années avant de récolter les retours d’expérience, raffiner les concepts d’emploi, les conditions d’homologation ou anticiper les contraintes logistiques associées au déploiement et au soutien.
Il est en effet possible dès à présent de pallier certaines limitations à travers des concepts de type « autonomie ajustable », testés dans le cadre de l’étude Tarot. Cela peut permettre à l’opérateur de reprendre la main lors d’une phase délicate (l’enjeu étant aussi de pouvoir débrayer des automatismes dans certaines situations, par exemple pour forcer un franchissement d’obstacle) ou lorsque la machine le réclame parce qu’elle détecte une dégradation de ses performances. Inversement, à mesure que progresse le niveau de confiance de l’opérateur envers la machine, il devient possible de déléguer au robot des tâches plus complexes.
“Des robots susceptibles
de choisir eux-mêmes leur cible et
de déclencher le tir. ”
Des atouts et une volonté, mais des questions éthiques à trancher
En conclusion, la transition vers la robotisation nécessite de relever de multiples défis mais on ressent désormais une véritable détermination dans le monde de la défense pour aller de l’avant. Et, si les démonstrateurs américains comme les quadripèdes robotisés de la société Boston Dynamics sont largement médiatisés, la France n’est pas en reste. Certains pays envisagent le déploiement de robots susceptibles de choisir eux-mêmes leur cible et de déclencher le tir. La plupart des grands systémiers de la base industrielle de défense investissent sur le sujet. La France dispose en outre d’un excellent tissu académique et d’infrastructures d’essai avancées comme celles de DGA Techniques terrestres à Bourges. Les initiatives en recherche, technologie et développement lancées par l’Agence européenne de défense et désormais par la Commission européenne devraient également démultiplier les efforts nationaux.
Une généralisation de l’emploi de la robotique imposera toutefois de surmonter certains freins, d’ordre psychologique, juridique ou éthique. En opération de maintien de la paix par exemple, il s’agira de veiller à maintenir le contact humain avec les populations locales pour éviter de présenter une image trop froide et technologique. Au sein des unités combattantes, l’impact psychologique des robots équipiers devra être surveillé car il arrive que certaines personnes tissent des relations affectives avec les robots, érigeant même parfois des plates-formes anti-IED en mascotte de la section.
Enfin, comme le souligne le récent rapport de mission de Cédric Villani sur l’IA, un point de vigilance particulier s’impose sur le sujet des systèmes d’armes létaux autonomes (Sala), ligne rouge pour la France : le futur comité d’éthique ministériel de défense, annoncé récemment par la ministre des Armées et destiné en premier lieu à traiter des questions posées par les technologies émergentes, ou le guide rédigé fin 2018 par la Commission européenne sur une « IA de confiance » devraient faciliter la gestion de ces problématiques cruciales.




