Les robots sauront-ils un jour faire quelque chose ?

REPÈRES
REPÈRES
La couverture du numéro de juin 1960 de Science et Vie annonce un article intitulé » Le robot à tout faire : mythe ou possibilité ? « . Elle est illustrée par le dessin d’une machine à forme vaguement humaine avec six bras, chacun réalisant une tâche ménagère différente, du repassage à la vaisselle, en passant par l’aspirateur. En parcourant l’article, il n’y fait aucun doute que, vingt ou trente ans plus tard, les tâches ménagères ne seront plus du ressort des humains. Cinquante ans après, nous sommes encore très loin de ces rêves.
Une grande difficulté réside dans la variabilité des tâches et de l’environnement
Après l’entrée en force des robots manipulateurs dans les usines automobiles au cours des années 1970–1980, on se prit à rêver que les capacités de manipulation de ces machines, additionnées à des facultés de raisonnement automatique allaient faire sortir ces robots des usines pour remplacer l’homme dans une grande variété de tâches pénibles. L’intelligence artificielle allait révolutionner le monde. Si dans le monde industriel, de nombreux métiers ont été remplacés par des machines, pourquoi les robots tardent-ils donc à entrer chez Monsieur Tout-le-monde ?
Appréhender l’environnement
|
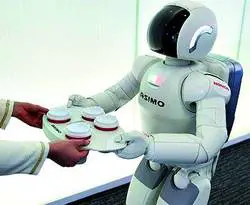
Le robot Asimo est le résultat d’un programme de recherche du constructeur automobile Honda, tenu secret entre 1986 et 1996 © Honda |
Les obstacles sont d’abord scientifiques et techniques. Pour les illustrer, considérons une tâche domestique usuelle : prendre une assiette dans un placard et la poser sur une table. La simplicité apparente de cette tâche cache en fait une montagne de difficultés : d’abord, ouvrir la porte du placard, c’est-à-dire, percevoir, reconnaître puis saisir la poignée, appliquer une force de quelques newtons, accompagner le mouvement de la porte ; ensuite, percevoir l’intérieur du placard, reconnaître une assiette, calculer sa position puis la saisir sans entrer en collision avec les verres, déplacer l’assiette jusqu’à la table puis poser l’assiette sans la casser. Une grande difficulté réside dans la variabilité des tâches et de l’environnement. En effet, si un robot est capable d’exécuter la séquence de tâches énoncée ci-dessus, il doit être également capable de se déplacer dans un environnement domestique quelconque, de manipuler divers types d’objets, durs, mous, colorés ou transparents. Ce type de tâche élémentaire mobilise diverses communautés de chercheurs en robotique. La vision artificielle par exemple transforme des images sous forme de matrices de millions de pixels en informations symboliques : objets, lieux.
Reconnaître et localiser dans une image un objet dont on a un modèle tridimensionnel fait encore aujourd’hui l’objet de recherches actives en vision par ordinateur.

Définir des modèles de représentation
Carte de l’environnement
Construire un modèle géométrique de l’environnement (on dit aussi une carte) amène à observer l’environnement à partir de plusieurs points de vue distincts. Dans la première vue, on sélectionne des éléments reconnaissables – des amers – et on calcule leur position par rapport au robot. Ensuite, le robot se déplace et prend une autre vue. Il faut alors reconnaître les amers déjà perçus, calculer leur position par rapport au robot, en déduire la position du robot dans la carte, ce qui permet de localiser les nouveaux amers dans la carte et de l’enrichir. Pour tenir compte des erreurs de mesure, on utilise des modèles stochastiques qui augmentent la complexité des calculs.
Pour agir, un robot a besoin de modèles précis. Ainsi pour planifier un mouvement dans un environnement d’intérieur, faut-il une connaissance parfaite de la forme et de la position des obstacles, à savoir les murs, les meubles et autres objets. Construire un tel modèle à partir de capteurs tridimensionnels relève encore du défi scientifique. Ce domaine, appelé localisation et construction de carte simultanée en est encore à un stade très préliminaire. La difficulté intrinsèque du problème réside dans l’adjectif » simultané « .
Obstacles contextuels
La robotique est une science de l’intégration. Or, la recherche en robotique est organisée en communautés thématiques s’intéressant aux différents problèmes – vision, commande, mécatronique, planification de mouvement – de manière relativement hermétique.
La robotique est une science de l’intégration
De plus, l’évaluation de la recherche essentiellement fondée sur le nombre de publications et de brevets n’encourage pas les efforts d’intégration car ils sont consommateurs de temps et peu rentables vis-à-vis des critères mentionnés précédemment. L’industrie, quant à elle, hésite à investir les efforts nécessaires en raison du manque d’applications rentables à court terme. Les cinquante dernières années ont vu un progrès lent et continu des outils scientifiques et techniques liés à la robotique. Les choses pourraient s’accélérer dans les prochaines années si l’émergence de marchés rend le domaine attractif pour les investissements industriels. Les précurseurs seront alors récompensés de leurs efforts.
Quelques précurseurs
Au Japon, les constructeurs automobiles Honda et Toyota investissent sur leurs fonds propres dans la recherche en robotique personnelle. Aux États-Unis, les applications militaires suscitent des investissements importants dans le domaine. En France, Aldebaran Robotics mise sur la robotique personnelle en ciblant dans un premier temps le marché du loisir.