L’autonomie ajustable en robotique militaire terrestre


Effectuer des tâches pénibles ou répétitives
L’introduction des systèmes robotisés répond généralement à trois objectifs principaux : réaliser les travaux dangereux (tout en limitant l’exposition de l’homme), accroître l’efficacité des forces et effectuer des tâches pénibles ou répétitives.
Ces objectifs opérationnels couvrent un large spectre de missions telles que l’observation, la reconnaissance, la surveillance de zones ou de périmètres, la protection des itinéraires, la logistique, ou encore le contre-minage.
Reconnaissance et transport
Les robots (aériens ou terrestres) commencent ainsi à être largement utilisés sur le champ de bataille. À titre d’exemple, aux États-Unis, des plates-formes comme le Packbot et le Talon ont déjà effectué plus de 20 000 missions (reconnaissance et neutralisation d’explosifs ou de colis piégés) en Irak. Le programme américain FCS (Future Combat System) prévoit en outre la mise en service prochaine de plusieurs milliers de robots dédiés à la reconnaissance, à la neutralisation d’objectifs ou au transport logistique (ARV, MULE, SUGV). Des démonstrateurs sont également en cours d’évaluation pour des missions comme l’extraction de blessés (robot Bear notamment). Cette approche très volontariste s’inscrit dans un texte voté par le Congrès qui stipule que, d’ici 2015, un tiers de la flotte de véhicules terrestres de combat sera constitué de systèmes non habités.
REPÈRES
L’idée de l’utilisation militaire des robots n’est pas nouvelle. Dès la Première Guerre mondiale ont été imaginés des robots destinés à forcer les barrières de barbelés séparant les tranchées. Il faudra toutefois attendre la Seconde Guerre mondiale pour voir aboutir la première utilisation opérationnelle, par les armées allemandes, de robots téléopérés dédiés à l’ouverture de brèches et à la dépose de charges explosives.
Outre les robots de déminage et de neutralisation d’explosifs, d’autres pays comme le Royaume-Uni et Israël commencent également à déployer des robots de reconnaissance et de surveillance sur le terrain (VipeR, Dragon Runner, Guardium). L’usage d’armes téléopérées sur les robots n’est plus tabou, même s’il est encore polémique, comme le montre la réaction de la presse au déploiement de 3 exemplaires du système américain Swords (Special Weapons Observation Remote reconnaissance Direct action System) à l’été 2008 au Moyen- Orient. Au niveau européen, l’Allemagne privilégie une approche centrée sur la téléopération de plates-formes lourdes tandis que le Royaume- Uni propose un éventail de robots opérationnels qui vont du robot portable au système ultralourd de contre-minage. Quant à la France, elle apparaît en pointe dans le développement des fonctions robotiques, allant de la téléopération assistée à des comportements de navigation bien plus autonomes comme l’évitement d’obstacles, le rejeu de trajectoires, ou le suivi de routes.
La surveillance du champ de bataille
|
Les trois composantes du démonstrateur MiniRoC |
Si les seuls robots en dotation dans les forces sont aujourd’hui des plates-formes téléopérées dédiées aux opérations de déminage et de neutralisation d’explosifs, la faisabilité technique d’autres types de systèmes robotisés opérationnels a été démontrée dans différents segments de missions au cours des deux dernières décennies : reconnaissance et surveillance du champ de bataille pour les systèmes Dards et Syrano, ouverture d’itinéraires pour le démonstrateur franco-allemand MMSRSydera ou encore assistance au combattant débarqué en zone urbaine pour les trois minirobots du démonstrateur MiniRoC.
Où porter les efforts pour favoriser l’utilisation opérationnelle des robots ?
L’acceptation de la robotique passe essentiellement par la confiance des hommes dans les systèmes. Or le constat actuel est celui de plates- formes performantes mais équipées de logiciels instables, ou d’architectures pertinentes mais sur des engins insuffisamment robustes. Bref, un niveau de maturité technologique qui a largement dépassé la recherche amont dans un certain nombre de thématiques, mais n’est pas encore au niveau de l’usage opérationnel sans condition.
Concevoir des robots efficaces et sans contraintes
En conséquence, outre la mise au point de plates- formes plus résistantes, les travaux français actuels visent le développement de systèmes où homme et robot se partagent les tâches au prorata de leurs compétences respectives (par exemple l’homme se concentre sur l’exploitation des charges utiles embarquées, tandis que le robot prend en charge le déplacement automatisé). En effet, la mise en oeuvre de robots totalement autonomes n’est ni réaliste à court terme pour la réalisation de tâches complexes, ni forcément souhaitable sur le plan opérationnel, car il reste extrêmement difficile d’inculquer aux robots des notions de haut niveau, liées à la doctrine notamment. À l’opposé, la téléopération induit des contraintes fortes en termes de bande passante, et n’est pas crédible lorsque le téléopérateur est soumis à un danger et à un stress importants (fantassin en zone urbaine par exemple).
Contrôler l’autonomie
Depuis une quinzaine d’années, nos travaux se sont focalisés sur le développement et le contrôle de l’autonomie pour la robotique aéroterrestre, avec d’une part les aspects liés à la perception en milieu hostile et son intégration au sein d’architectures de contrôle de systèmes robotisés autonomes, d’autre part le problème des interactions homme-robot avec le développement et l’expérimentation d’un concept d’autonomie ajustable.
Les démonstrateurs récents se concentrent donc sur des modes d’interaction homme-robot plus élaborés et plus flexibles, où le niveau d’autonomie du robot évolue selon la charge de travail de l’opérateur, la complexité des tâches à réaliser et la difficulté de l’environnement : l’objectif est de concevoir des assistants robotisés efficaces au service des combattants, en limitant au minimum leurs contraintes d’utilisation. L’ensemble des travaux de perception autonome présente un caractère relativement pragmatique, susceptible de déboucher rapidement sur des systèmes opérationnels : cela nous a amenés à nous concentrer sur des processus de perception spécialisés pour des tâches ou des contextes particuliers, pouvant s’intégrer facilement dans des comportements sensorimoteurs aisément exploitables par le robot : suivi de mur, suivi de route, évitement d’obstacle, etc.
S’adapter au contexte opérationnel et à la nature de la mission
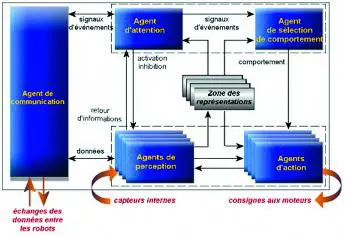
Il a fallu ensuite aborder les problèmes de conception et de réalisation d’architectures de systèmes robotisés autonomes : nous avons alors considéré les problématiques de perception (analyse d’images), d’action, de traitement en temps réel, et de décision, sous l’angle de la mise en commun de toutes ces capacités dans un système (avec un ou plusieurs robots) réel, autonome et en boucle fermée. Cela a été rendu possible par les études d’une architecture de contrôle adaptée à la robotique terrestre, baptisée Harpic, qui organise les diverses capacités à la disposition du robot en un tout cohérent. Ces développements concernant la perception et les architectures de contrôle ont finalement été fédérés dans un système d’autonomie ajustable, qui fournit au téléopérateur différents modes de contrôle du robot, allant de la téléopération pure jusqu’à l’autonomie complète, lui permettant ainsi d’adapter sa charge selon le contexte opérationnel et la nature de la mission.
Rallier les objectifs
Validés à travers diverses expérimentations en environnement intérieur et urbain, ces travaux ont inspiré les spécifications du programme d’études amont Tarot de la DGA, qui étend les principes de cette architecture au déplacement en extérieur, avec des comportements tels que le suivi de véhicule, le suivi de lisière ou le ralliement d’objectifs en terrain accidenté. Un pied d’égalité Pour être au rendez-vous du Livre blanc Défense et Sécurité nationale, qui identifie la robotique comme une rupture technologique pressentie à l’horizon 2020–2030, un certain nombre de technologies clés restent à développer ou à améliorer. Il s’agit en particulier des moyens de locomotion innovants (ex. : robots capables de grimper sur des parois verticales) permettant aux robots d’évoluer en environnement tout terrain ou dans les milieux urbains déstructurés. Il importe également de poursuivre les travaux sur la perception autonome robuste pour la navigation, la localisation, la modélisation de l’environnement et l’analyse de situation, dans des environnements dynamiques et des conditions météorologiques variées.
Communiquer en zone urbaine
En vue de faciliter l’utilisation des engins robotisés, il serait utile de définir des modes d’interaction homme-robot plus évolués (en visant à long terme le principe des » initiatives mixtes » où les deux entités, homme et robot, coopèrent sur un pied d’égalité), d’exploiter des interfaces hommemachine avancées (interfaces multimodales, gants tactiles, visée » tête haute »), et d’augmenter l’autonomie décisionnelle des systèmes afin de mettre en oeuvre des comportements plus » tactiques » (camouflage, modes de déplacement furtifs ou rapides) voire des comportements collaboratifs multirobots, éventuellement basés sur des mécanismes d’apprentissage. Les futurs systèmes opérationnels devront également disposer de moyens de télécommunication plus performants, en zone urbaine notamment, et si besoin de dispositifs permettant de gérer des pertes locales de transmission (retour sur traces, dépose de relais de communication, etc.).

Vingt mille missions de robots aériens ou terrestres ont été effectuées en Irak. US Air Forces
Une intelligence tactique
Toutefois, les robots ont déjà prouvé leur valeur militaire sur le terrain et malgré les limitations de certains systèmes existants, les soldats américains engagés dans les zones de conflits actuels (essentiellement urbains et asymétriques) ne veulent plus s’en séparer. Il s’agit donc à court terme de se focaliser sur les innovations technologiques à forte valeur ajoutée et de faire travailler de concert ingénieurs et opérationnels en vue de résoudre les points durs technologiques. Si l’on se projette dans les décennies à venir, on peut prévoir une répartition améliorée entre l’homme et le robot à l’horizon 2015, la coordination multiplateforme vers 2020 (missions de patrouilles, contrôle de zone, reconnaissance, convoyage) tirant vers la coopération à l’horizon 2025, voire une véritable intelligence tactique aux alentours de 2030.
Action et perception
Si l’on veut même aller au-delà du domaine applicatif de la robotique et mettre en perspective l’architecture de contrôle de l’autonomie décrite ci-dessus, citons les travaux récents, où nous réabordons les concepts mêmes des deux boucles précitées : l’objectif est de les réinterpréter sous l’angle d’une négociation entre participants d’un débat avec argumentations, avec quatre composantes, action, perception, supervision et diagnostic.
L’intelligence tactique prévue en 2030
Action et perception ont une signification analogue, la sélection de comportements est réinterprétée comme la supervision, le mécanisme d’attention comme le diagnostic. Les liens particuliers ne relevant pas directement des deux boucles sont alors les alertes entre la perception et la supervision, les régulations entre le diagnostic et l’action. Cela permet alors de considérer les couples action-perception et diagnostic-supervision comme prenant part à un jeu d’oppositions paradigmatiques qui se résout par les liens particuliers. Ainsi, on peut voir dans quelle mesure l’argumentation apporte à chaque participant de nouvelles connaissances pour améliorer sa propre action. Nous avons formalisé tout cela avec des outils mathématiques relevant de la théorie des catégories. À l’aune de cette interprétation différente, nous abordons les modes de raisonnements collectifs tels qu’ils sont pratiqués dans des communautés scientifiques (on reconnaît l’influence de Thomas Kuhn dans cette vision), élargissant donc le champ d’application des travaux menés initialement en robotique, mais bouclant également la boucle sur le plan épistémologique dans la mesure où nous sommes initialement passés de l’homme au robot, et revenons ainsi du robot à l’homme.